|
 | |  |
| Главная » Баллистика и навигация космических аппаратов
Глава 13. Маневры сближения и встреча КА на орбитеОсуществление операции встречи КА на орбите обычно связано с необходимостью управления относительным движением аппаратов, в результате которого создаются условия, требуемые для их совместного полета. Причем под совместным полетом будем понимать как движение при наличии между несколькими КА физического контакта (полет «в связке» или в состыкованном состоянии), так и движение на некотором расстоянии друг от друга (совместный групповой полет). Примером первого вида совместного полета служит полет ОК «Мир», связок орбитальной станции (ОС) «Салют», космического корабля (КК) «Союз» и транспортного корабля (ТК) типа «Прогресс», второго — групповой полет КК «Союз-6», «Союз-7» и «Союз-8». Хотя в общем случае может иметь место управление всеми аппаратами, участвующими в выполнении совместного полета, обычно все же задачу встречи на орбите трактуют как осуществление операции сближения маневрирующего активного КА — т
...
Читать дальше »
|
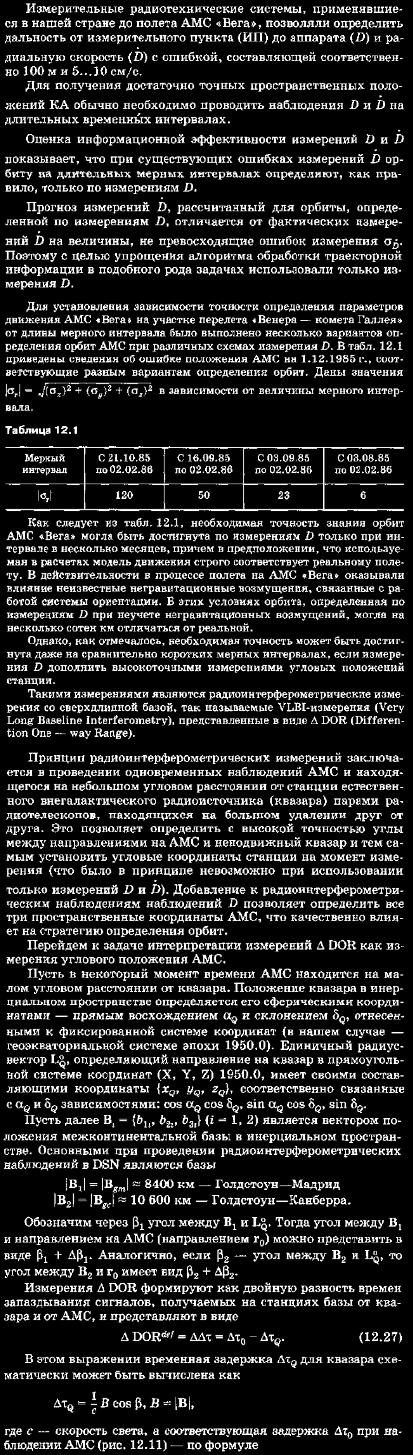
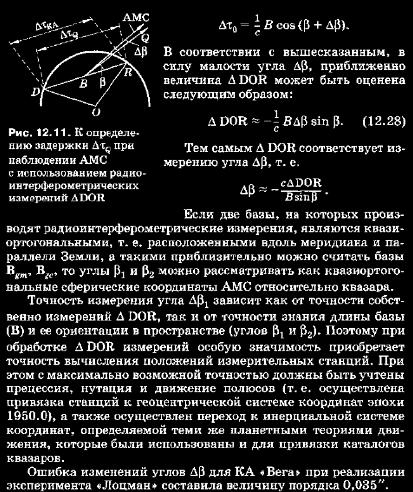
12.4. Применение высокоточных радиоинтерферометрических измерений DOR для межпланетной навигации
|
12.3. Методические погрешности и инструментальные ошибки построителей базисных направлений и бортовых астроиэмерителей. Методы повышения точности измерений при решении навигационных задачОдной из главных, а во многих случаях основной причиной возникновения ошибок любых гироскопических приборов служат действующие на гироскоп возмущающие моменты, обусловленные техническим несовершенством конструкции подвеса. Соответствующие им ошибки гироскопических приборов, используемых в качестве построителей базисных направлений, называют инструментальными погрешностями. Следует, правда, отметить, что по сравнению с гироскопическими приборами, работающими на Земле, гироскопические приборы, установленные на борту КА, оказываются в более благоприятных условиях эксплуатации (87]. Прежде всего при полете КА по орбите становятся практически несущественными несовпадение центра масс гироскопа с центром его подвеса и, как следствие, все те трудно преодолимые факторы, которые порождают э
...
Читать дальше »
|
12.2. Моделирование базисных направлений и получение навигационной информации с помощью астрономических, гироскопических датчиков и комплексных навигационных систем пилотируемых и беспилотных КАДля моделирования базисных направлений и решения задач космической навигации все более широкое применение получают АВТОНОМНЫЕ ОПТИКО-ВИЗУАЛЬНЫЕ АСТРОНОМИЧЕСКИЕ СРЕДСТВА. К их числу относят солнечные, планетные и звездные датчики, аст-ровизиры, космические секстанты и другие устройства. Моделирование базисных направлений предполагает обычно работу соответствующих датчиков в режиме нуль-индикаторов. Поскольку постоянная составляющая модулированного в приборе светового излучения от звезды пропорциональна угловому расстоянию от оптической оси датчика, сигнал рассогласования используют для задания соответствующего базисного направления путем поддержания линии визирования на заданное светило. Контроль за работой автоматического звездного датчика можно осуществлять с помощью ручного АСТР
...
Читать дальше »
|
12.1. Особенности решения навигационной задачи при автономном выполнении межорбитальных маневровУсловия решения навигационной задачи на борту КА, т. е. при реализации автономного способа управления маневром, значительно отличаются от условий решения этой задачи с помощью наземных средств КИК. К основным особенностям автономного решения задачи навигации обычно относят следующие: ► состав навигационных измерений ограничен, а общее число измерений невелико; ► БЦВМ, в которой проводят все вычисления, обладает ограниченными возможностями с точки зрения полноты математического описания процесса в реализуемом алгоритме, объеме и точности проводимых вычислений; ► участие экипажа КА в решении навигационной задачи вносит дополнительные погрешности, обусловленные влиянием на него всех специфических (часто экстремальных) факторов космического полета. При разработке алгоритмов автономного решения навигационной задачи, как правило, исходят [21, 85] из того,
...
Читать дальше »
|
Глава 12. Навигационное обеспечение и автономная навигация при выполнении межорбитальных маневров КАВ теории космической навигации с некоторой долей условности приняты два направления навигационного обеспечения, различающихся в зависимости от степени близости орбит КА к поверхности планеты, получивших название околопланетной и межпланетной навигации. В первом приближении можно считать [115], что околопланетная навигация ограничивается условиями, когда расстояния между КА и навигационной точкой (НТ), относительно которой определяют параметры движения, соизмеримы с радиусом планеты, а при межпланетной навигации эти расстояния значительно превышают размеры планеты. Околопланетная навигация делает возможным проведение измерений и обработку информации как на борту КА, так и на нт. Первому случаю соответствует схема самоопределения, поскольку решение навигационной задачи осуществляют без привлечения средств, расположенных вне борта КА, второму — схема иноопр
...
Читать дальше »
|
11.9. Анализ стратегий коррекции движения АМС «Вега»Хотя с момента реализации полета АМС «Вега» к комете Галлея прошло уже достаточно много времени, уникальность и сложность этого, без преувеличения, выдающегося научного эксперимента, по крайней мере, с точки зрения баллистического обеспечения, таковы, что заслуживают детального анализа в учебной литературе в качестве примера практической реализации рассмотренных выше теоретических положений. В третьей главе мы уже делали ссылку на этот полет с точки зрения эффективности использования гравитационного маневра для решения задачи последовательного облета одним аппаратом двух космических тел. Там же описана принятая в процессе реализации экспедиции схема полета. Здесь основное внимание сосредоточим на анализе выбора стратегий коррекции и реализации выбранного варианта [38]. Сложность решения обсуждаемой задачи обусловливалась прежде всего невозможностью достаточно надежной оценки точности параметров
...
Читать дальше »
|
11.8. Особенности постановки задачи определения характеристик стохастической коррекцииВ отличие от детерминированной коррекции, в рамках постановки которой можно ограничиться определением только конкретных значений вектора корректирующей скорости, предельных ошибок и энергозатрат на проведение коррекции, методика расчета стохастической коррекции в общем случае должна включать (38] в себя способы определения законов и параметров распределения соответствующих характеристик. Существенным достоинством постановки задачи линейной стохастической коррекции является то, что при нормальном законе распределения ошибок управления при ее выполнении и навигационных измерений, используемых для определения орбиты, законы распределения характеристик коррекции, связанные с этими ошибками линейной зависимостью, также являются нормальными. Однако даже в рамках наиболее широко распространенной (в силу ее простоты) схематизации, далеко не все характеристики линейной коррекции мо
...
Читать дальше »
|
11.7. Аналитическое определение корректирующих воздействий при различных составах управляемых параметровПри рассмотрении корректирующего маневра как процесса управления возникает необходимость определения взаимосвязи корректирующих воздействий с управляемыми параметрами. Отчасти результатом решения соответствующей задачи могли бы служить материалы, изложенные в § 10.3. Дело в том, что при любой математической постановке задачи коррекции во главу угла ставится условие достижения близости реализуемого и номинального движений. Поэтому и с точки зрения выбираемых критериев качества, и с точки зрения используемой модели движения приоритет должен быть отдан «точностным» построениям, физически гарантирующим более высокую, чем при выполнении маневра орбитального перехода, точность процесса. Имея это в виду, в качестве подлежащего минимизации критерия, в отличие от (10.34), здесь уже более целесообразным является использование критерия вида
|
11.6. Связанные коррекцииПроведение многоразовой оптимальной неоднородной коррекции предполагает поочередное смещение траектории в пространстве корректируемых параметров вдоль наиболее эффективных направлений. При этом исходят из того, что суммарное смещение должно получиться равным заданному. В отличие от обычного случая многоразовой коррекции, применительно к которой каждая последующая коррекция исправляет ошибки предыдущей при неизменных условиях коррекции (однородная коррекция), характеристики неоднородной коррекции определяют из различных условий. Рассматриваемый подход можно применять [51] для трех-компонент ного случая и реализации соответствующих вариантов трехразовой и четырехразовой коррекции.
|
« 1 2 ... 4 5 6 7 8 ... 16 17 » |
| | |