Баллистика и навигация космических аппаратов
|
6.9. Методы определения вектора состояния КА по измерениям текущих навигационных параметров Периодическое определение вектора текущего состояния КА в течение всего срока его активного существования необходимо для поддержания требуемой точности баллистико-навигацион-ных расчетов, используемых в процессе оперативного управления полетом КА. По результатам определения вектора состояния КА решают задачи прогнозирования, расчета данных на коррекцию орбиты и другие задачи технологического цикла оперативного БНО (ОБНО) управления полетом КА, в частности, задачу формирования целеуказаний для наведения антенн радиотехнических средств ВТИ в последующих циклах уточнения орбиты. При прогнозировании вектора состояния КА обсуждаемую задачу трактуют как «задачу уточнения начальных условий» на основе результатов измерений. Как правило, при решении задачи определения параметров движения (ОПД) КА накладывают ограничения на: ► количество используемых сеансов измерений текущих навигационных параметров (ИТНП); ► количество измерений в каждом сеансе; ► спектр учитываемых возмущений, который определяют используемой математической моделью движения КА; ► состав компонентов оцениваемого вектора состояния и др. Обычно процедуру определения вектора состояния КА проводят в два этапа. Первый этап — предварительная обработка результатов измерений — включает в себя: ► приведение полученной исходной измерительной информации к соответствующим физическим размерностям; ► раскрытие неоднозначности в получаемых в процессе математической интерпретации значениях компонентов вектора измерений; ► первоначальную отбраковку результатов аномальных измерений; ► вычисление интегральных величин, характеризующих качество полученных текущих навигационных параметров. Второй этап, на котором и происходит собственно определение вектора состояния КА, — обработка одним из рассмотренных ранее статистических методов массива накопленных данных. При обсуждении возможностей применения МНК к решению рассматриваемых задач было отмечено, что вероятность получения приемлемого результата в значительной степени зависит от матрицы С(0, представляющей собой функциональную матрицу частных производных от измеряемых навигационных функций по начальным условиям вектора оцениваемых переменных (см. (6.26)).  В алгоритме решения задачи определения параметров движения КА с учетом изложенного должны быть предусмотрены средства для распознавания случаев плохой обусловленности и методы, позволяющие даже в этом неблагоприятном случае получить приемлемое решение. Всю совокупность существующих методов решения плохо обусловленных задач условно можно подразделить на две группы: методы, базирующиеся на качественном анализе конкретной физической задачи, позволяющие априори оценить возможность ее решения при различном составе и объеме выборок измерений; методы, направленные на использование' усовершенствованных процедур обращения плохо обусловленных матриц и различного рода регуляризующих процедур (типа методов частичной регуляризации, Ньютона—Канторовича, стабилизирующего метода Левенберга—Марквардта и др.). Одним из наиболее перспективных методов решения плохо обусловленных задач определения параметров движения КА принято считать метод сингулярного разложения матриц, относящийся ко второй группе методов решения плохо обусловленных задач. 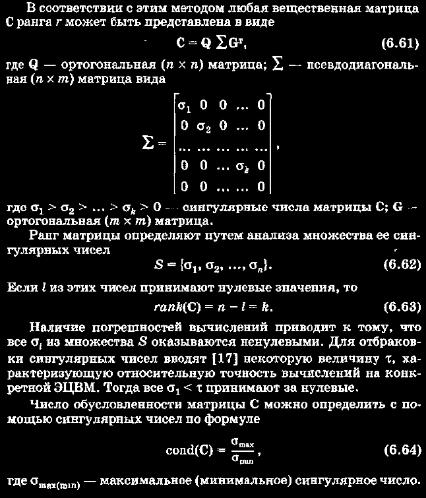 Таким образом, изложенный метод сингулярного разложения матриц предоставляет возможность контролировать уровень обусловленности решаемой задачи. Это позволяет, в свою очередь, предусмотреть в специализированных пакетах программ обработки данных соответствующую сигнальную информацию для критических случаев, требующих вмешательства оператора-расчетчика. Ранг и число обусловленности обычно выдают оператору вместе с другой информацией, помогающей оценить качество получаемого решения. Как уже отмечалось, другим весьма существенным фактором, влияющим на точность обработки результатов измерений ВТИ, является наличие в получаемой выборке аномальных и систематических погрешностей измерений. Поэтому все применяемые на практике методы ОПД КА включают ту или иную процедуру выявления недоброкачественных измерений. Как правило, такие измерения исключают из выборки на каждой итерации, хотя существуют алгоритмы, в которых недоброкачественным измерениям присваивают существенно заниженные веса. Наиболее простыми и наиболее распространенными являются процедуры, в которых используют некоторые эвристические соображения. Все такие процедуры можно разделить на две группы по исходным предпосылкам относительно погрешностей измерений. При разработке процедур первой группы множество всех измерений ye(t) считают одной выборкой из некоторой гипотетической совокупности. Путем оценки внутренней согласованности результатов измерений решают задачу отбраковки аномальных измерений. Для этого рассчитывают последовательность допустимых отклонений реальных значений ye(t) от их расчетных аналогов Ue(q, t) на каждой итерации процесса последовательных приближений. При разработке процедур второй группы предполагают, что сеансы измерений являются различными выборками, характеризующимися своими погрешностями. Для исключения аномальных измерений решают две задачи: ► выявление сеансов, содержащих большие погрешности; ► исключение аномальных результатов измерений внутри каждого сеанса. Но несмотря на сравнительную простоту эти процедуры, как правило, существенно зависят от специфики конкретно решаемой задачи и ее особенностей (условий наблюдения КА, влияния тех или иных погрешностей модели движения, особенностей работы измерительных средств и т. д.). Особенно проблематичным при этом являются вопросы определения значений конечных допусков, учета влияния на отклонение измерений отдельных погрешностей в начальных условиях и др. По этим причинам в последнее время заметно возрос интерес к разработке более строгих и обоснованных способов борьбы с аномальными измерениями на основе использования достижений теории робастного оценивания, дискриминантного анализа, распознавания образов. Теоретически доказано, например, что в условиях сильного засорения выборки аномальными измерениями более предпочтительными по сравнению с алгоритмами обработки, основанными на методе наименьших квадратов, являются алгоритмы метода наименьших модулей. Близкие проблемы приходится решать при разработке способов учета влияния систематических погрешностей на точность ОПД. Полное исключение этого влияния для метода наименьших квадратов происходит при точном учете корреляции между погрешностями измерений. Однако уровень значений величин фактической корреляции обычно крайне низок. Поэтому разработан ряд методов и алгоритмов при неизвестной корреляции между погрешностями измерений. Эти методы, позволяющие вместе с параметрами движения КА оценивать элементы весовой матрицы Р, являются перспективными, хотя и не получили пока распространения в основном из-за громоздкости и сравнительной сложности анализа получаемых результатов. В практике определения параметров движения КА используют алгоритмы, представляющие три основных направления развития способов снижения влияния систематических погрешностей измерений, разработанные в рамках метода наименьших квадратов: ► обнаружение и исключение из обработки групп измерений, содержащих систематические погрешности, путем выбора допустимых отклонений измеренных параметров от их расчетных значений; ► выбор весов измерений на основе оценки величины систематических погрешностей групп измерений; ► исключение характеристик систематических погрешностей измерений из числа оцениваемых параметров qj Применение перечисленных способов позволяет в ряде ситуаций заметно повысить точность ОПД. Недостатками первых двух способов являются потери информации, возникающие в результате исключений групп измерений, а также низкая эффективность при отсутствии выделяющихся систематических погрешностей, смещенность оценок параметров q1 Третий способ свободен от этих недостатков, однако его применение осложняется необходимостью формирования и решения системы уравнений (6.27) высоких порядков. В некоторой степени избежать этого позволяет примспснис раоповидпости третьего способа, при котором осуществляют такое преобразование исходных измерений, когда они практически не содержат систематической погрешности, если ее вид заранее известен. Например, для исключения влияния постоянной систематической ошибки сеанса измерений, являющейся, как показывает практика, наиболее характерным и распространенным видом погрешностей, используют разностные измерения, полученные вычитанием из исходных опорного измерения, являющегося средним арифметическим всех измерений данного сеанса. Метод определения параметров движения, основанный на применении указанного преобразования, получил название метода обработки по разностям измерений (метод разностей) и в настоящее время является основным для обработки измерений. Имея в виду приведенные выше соображения, перейдем теперь к обсуждению непосредственных задач определения вектора состояния КА, ограничившись рассмотрением предельных вариантов: ► классификации и селекции сеансов измерений вектора состояния КА ближнего космоса; ► определения вектора состояния геостационарного КА на основе однопунктных схем измерения текущих навигационных параметров. Имея в виду (6.4) и (6.7), представим измеряемую величину аддитивно «деформируемой» погрешности 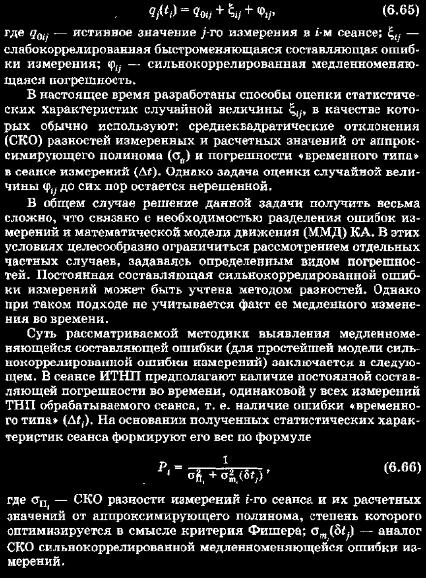 Тогда в алгоритме классификации веса сеансов измерений должны вычисляться по формуле (6.66), исходные данные для которой находят в процессе решения задачи определения вектора состояния КА. Веса сеансов вычисляют вновь на каждом сближении процесса решения задач и, участвуя в формировании системы нормальных уравнений типа (6.34), они позволяют обрабатывать сеансы, содержащие аномально большие ошибки измерений. В результате при решении «стандартных» задач определения вектора состояния КА ближнего космоса по «эталонным» схемам удается достаточно устойчиво выделить «недоброкачественные» сеансы измерений при их наличии в цикле навигационных измерений, обеспечивая при этом точностные характеристики определения параметров движения КА, близкие к эталонным. С совершенно иной проблемой приходится сталкиваться при определении вектора состояния геостационарных КА (ГКА) при навигационных измерениях, выполняемых по однопунктной схеме расположения траекторных измерительных средств (ТИС). Одной из особенностей координатно-временного перемещения центра масс ГКА относительно неподвижного ТИС на поверхности Земли является малая интенсивность изменения измерительных функций в единицу времени. В практике управления ГКА в качестве измеряемых параметров, как правило, используют наклонную дальность и радиальную скорость. При однопунктных схемах комбинированный эффект характера изменения измеряемых функций и условий наблюдения движения ГКА приводит к ситуации, когда сингулярный анализ решаемой системы нормальных уравнений (СНУ) или системы условных уравнений (СУУ) идентифицирует факт плохой наблюдаемости даже при значительной продолжительности мерного интервала. В связи с необходимостью удержания КА на заданной долготе в период активного существования ГКА периодически проводят коррекцию орбиты (как правило, один раз в 2...4 месяца). Учитывая, что периодичность проведения ИТНП составляет около 30 сут, в условиях интенсивной динамики изменения параметров орбиты под действием активных сил применение метода обработки без исключения систематической составляющей не позволяет обеспечить требуемую надежность использования проверочной последовательности пробных решений в методе дискретной параметризации. Рассмотрим типичные результаты определения вектора состояния ГКА по однопунктной и штатной схемам измерения текущих навигационных параметров. В качестве штатной будем рассматривать схему с двумя «разнесенными» НИПами. В качестве интервала определения движения ГКА по данным навигационных измерений примем интервал в 6 мес. с периодичностью примерно в 30 сут. Таким образом, применение используемых в настоящее время в практике алгоритмов, основанных на обобщенном МНК, не обеспечивают требуемую точность и надежность определения ВС при однопунктной схеме. В предельном случае, при переходе от вырожденной матрицы СНУ (СУУ) к плохообусловленной, неоднозначность в получаемом решении проявляется в наличии линейных связей между уточняемыми компонентами вектора состояния. Для этой ситуации характерным является мультиколлинеарность векторов, образующих матрицу частных производных. Для исключения неопределенности при решении задачи нахождения вектора состояния КА в этом случае применим подход, основанный на анализе корреляционной структуры решаемой системы нормальных уравнений и формирования на этой основе идентифицируемых ограничений вида Rdq = 0, (6.67) причем данное ограничение является идентифицирующим для матрицы R размерности (s х т) тогда и только тогда, когда строки матрицы С размерности (п x т) линейно не зависят от строк матрицы R, и столбцы матрицы R линейно независимы. |
Случайные фотографии:






Статьи:
Видео:
Последние новости:
| Семья Юпитера |
| Чужая жизнь в отраженном свете |
| Административное состояние Земли |
| Вблизи полярного сияния на Юпитере |
| Солнечный протуберанец |
Видео:
 | Spacecraft Image Mashup Shows Galactic Collision |
| Путешествие на край Вселенной. часть 2/10 |
| Путешествие на край Вселенной. часть 1/10 |
Последние новости:
| Зонд НАСА рассмотрел ледяные горы на поверхности Плутона |
| На Землю надвигается сильный метеоритный дождь |
| NASA создаст роботов для ремонта и дозаправки спутников |
| Россия и Япония совместно построят космический телескоп |
|
WalkInSpace.Ru Правила: «Путешествие в космос» © 2024 Использование материалов допускается при условии указания авторства WalkInSpace.ru и активной ссылки на www.WalkInSpace.ru. |
|