Шесть лет в марсианской пыли |
 В каждом из шести колес марсианского автоматического разведчика Spirit находится двигатель, работающий независимо от пяти других. Но теперь, когда все шесть колес увязли в марсианском песке, марсоходу уже ничто не поможет. Фото: NASA/JPL-Caltech 26 января 2010 года NASA приняло решение прекратить попытки вытащить марсоход Spirit из песчаной ловушки, в которую он угодил почти девять месяцев назад. Впрочем, на этом карьера аппарата не закончится. Поскольку он способен поддерживать связь с Землей, то еще послужит стационарной исследовательской лабораторией. Кроме того, Spirit — далеко не единственный, не первый и не последний исследователь Марса. История планетоходов-разведчиков насчитывает уже сорок лет. Впрочем, обо всем по порядку. Номер первый В самом начале 60-х годов прошлого века в знаменитом ОКБ-1, которым руководил Сергей Павлович Королев (1907–1966), родилась амбициозная и довольно необычная идея создания самоходных аппаратов, предназначенных для исследования различных космических объектов (планет и спутников). Первоочередной целью для ученых стала Луна как наиболее близкое к Земле и наиболее изученное небесное тело. Уже осенью 1966 года был утвержден эскизный проект первого «Лунохода», а к концу 1967-го подготовлена вся конструкторская документация. Таким образом, проектирование было завершено в рекордные сроки, а ведь ученым и конструкторам нужно было решить комплекс сложнейших и необычных задач. Во-первых, требовалось разработать ходовую часть. Среди предлагаемых вариантов были шагающие, прыгающие, перекатывающиеся аппараты и даже «луноплавы», так как существовала гипотеза, что поверхность Луны покрыта толстым слоем пыли, в которой потонет любой спускаемый аппарат. Кстати, споры ученых по поводу лунного грунта продолжались больше года, пока Королев не решил проблему в приказном порядке, наложив свою известную резолюцию «Луна твердая!». Экзотические движители также было решено не рассматривать, а сконцентрировать усилия на более привычных колесных,гусеничных или шнековых системах. Здесь возникала вторая проблема — жесткие ограничения по массе шасси в сочетании с высочайшими требованиями по прочности и надежности. Первоначально разработкой движителя должны были заниматься сотрудники Научно-исследовательского института Госкомитета автотракторного и сельскохозяйственного машиностроения (НАТИ). Однако они посчитали требования, выдвинутые ОКБ-1, слишком жесткими и отказались от разработки. В итоге луноходами занялись в Институте транспортного машиностроения (ВНИИтрансмаш), специализировавшемся на конструировании танковой техники. К концу 1967 года под руководством Александра Леоновича Кемурджиана (1921–2003) самоходное шасси было закончено. Движитель состоял из восьми мотор-колес, упругой подвески, электромеханической трансмиссии с индивидуальным приводом колес, тормозной системы, блока автоматики и комплекта информационно-измерительной аппаратуры, предназначенной для контроля состояния ходовой части. Благодаря широкому применению в конструкции титановых сплавов ВНИИтрансмаш все-таки «вписался» в жесткие требования ОКБ-1, общая масса самоходного шасси составила всего 84 кг. 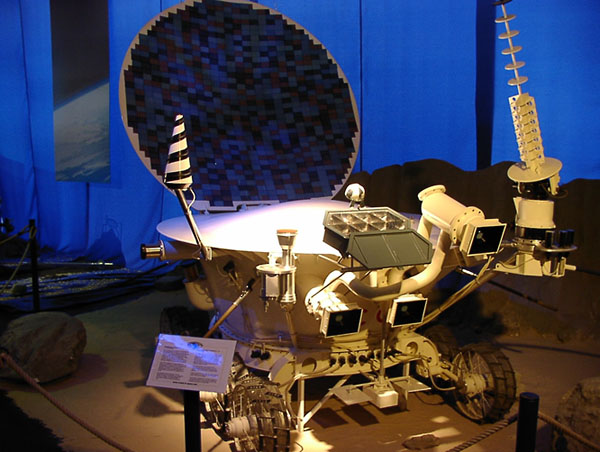 Модель «Лунохода-2» на выставке «Россия в космосе», проведенной в 2002 году в аэропорту Франкфурта-на-Майне. Фото (Creative Commons license): HPH Комнатная температура Параллельно с разработкой шасси инженеры решали задачу терморегуляции аппарата. На Луне нет атмосферы, нет защиты от солнечных лучей, свет не рассеивается, и всякое тело нагревается только с одной стороны — там, где Солнце. Аппарату предстояло функционировать в условиях чудовищного перепада температур: освещенный Солнцем борт нагревается до +150 °C, а противоположный — почти на триста градусов холоднее. При этом внутри «Лунохода», для нормального функционирования всех систем должны поддерживаться «нормальные условия» — то есть комнатная температура (в действительности немного ниже — 17 °C), влажность и давление (что обеспечивалось герметичностью корпуса и постоянством температуры внутри). Для этого в верхней части корпуса «Лунохода» разместили радиатор системы охлаждения, который на ночь закрывался своеобразной крышкой для сохранения тепла. На этой же «крышке» с внутренней стороны были смонтированы панели солнечных батарей, днем снабжавшие «Луноход» электричеством. Ну, а во время лунной ночи, пока «Луноход» стоял, для обогрева приборного отсека применялся радиоизотопный источник тепла, а также система нагревателей, работающих от аккумулятора. Наконец, нужно было решить вопрос о системе управления. Первоначально рассматривались проекты полностью автоматического планетохода, но потом остановились на радиоуправляемом варианте. Восемнадцать «сидячих космонавтов», офицеров-ракетчиков, должны были стать экипажем «Лунохода». Интересно, что кандидатуры летчиков (которых всегда охотно брали на должность «обычных космонавтов) даже не рассматривались. В числе основных требований к кандидатам, помимо дисциплинированности, работоспособности, отличного здоровья, стрессоуйстойчивости и других, вполне обычных качеств, было и «полное отсутствие какого бы то ни было опыта в области управления транспортными средствами». Даже заядлых велосипедистов заворачивали на стадии рассмотрения личного дела. Ученые посчитали что «земной» опыт в управлении транспортными средствами будет только мешать. Со второй попытки Первый «Луноход» отправился к Луне 19 февраля 1969 года. На 51-й секунде полета произошло разрушение головного обтекателя корабля, в результате чего осколки, благополучно пролетев вдоль третьей и второй ступени, врезались в топливные баки, спровоцировав эффектный взрыв. Второй запуск состоялся только 10 ноября 1970 года. За это время на Луне успел побывать экипаж американского «Аполлона-11». На этот раз всё прошло без накладок: межпланетная станция «Луна-17» благополучно прилунилась в Море Дождей 17 ноября, и «Луноход-1» приступил к выполнению своей миссии. Программа была завершена к 20 февраля 1971 года, но «Луноход-1» даже и не собирался помирать. Пришлось разрабатывать новую программу исследований на следующий лунный день, потом еще на один, а потом еще на один… Всего планетоход проработал 301 сут. 6 ч 37 мин, более чем в три раза превысив расчетный ресурс. За это время «Луноход-1» обследовал около 80 тыс. м2 поверхности Луны, передал на землю более 20 тыс. снимков поверхности, более 200 панорам. В 25 точках был проведен химический анализ поверхностного слоя лунного грунта и в более чем в 500 точках определены физико-механические свойства поверхности. 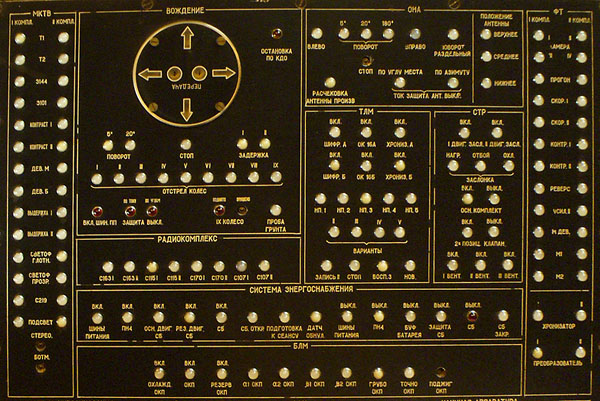 Панель управления «Лунохода-2». Считалось, что принципы дистанционного управления космическим аппаратом настолько отличны от всего земного, что любой автоматизм — даже приобретенный верхом на велосипеде — окажется вреден. Фото: Regnard 15 сентября 1971 года, при наступлении 11-й лунной ночи аппаратура зафиксировала падение температуры внутри приборного отсека, вероятно, вследствие выработки ресурса изотопного источника тепла. 30 сентября, на рассвете очередного лунного дня, «Луноход-1» на связь уже не вышел. Вторая экспедиция 16 января 1973 года автоматическая межпланетная станция «Луна-21» доставила на естественный спутник Земли ценный груз — «Луноход-2». Этот аппарат был, по сути, лишь немного усовершенствованной копией первого планетохода. Прежде всего, у него была перестроена телевизионная система, благодаря чему скорость передачи одного кадра уменьшилась до трех секунд вне зависимости от сложности рельефа (на «Луноходе-1» этот процесс занимал до двадцати секунд, что существенно усложняло процесс управления). Во-вторых, для улучшения обзора добавили третью камеру, расположенную на уровне глаз стоящего человека. В-третьих, была доработана система автоматических блокировок, срабатывающих при возникновении опасности для аппарата (большой крен, перегрузка двигателей колес и т. д.). В-четвертых, была изменена и система энергопитания. На «Луноходе-2» были установлены две доработанные аккумуляторные батареи суммарной емкостью в 250 А-ч (против 200 А-ч у первой модели), а также усовершенствованные фотоэлементы солнечной батареи. Тем не менее карьера «Лунохода-2» началась не слишком удачно. Сперва посадочная ступень едва не провалилась в кратер, приземлившись буквально в трех метрах от него. Затем выяснилось, что отказала навигационная система. Ну, и напоследок, опасный кратер, возле которого приземлился спускаемый модуль находился так близко, что при первоначальном осмотре местности его не заметили, и «Луноход-2» въехал прямо в него. К счастью аппарат не только не перевернулся, но и смог успешно выбраться из кратера и приступить к выполнению своей программы. Несмотря на отказ навигационной системы (из-за которого штурманам приходилось ориентироваться по Солнцу и окружающей обстановке), «Луноход-2» оказался гораздо продуктивней своего предшественника. Он передал на Землю более 80 тыс. снимков лунной поверхности, 86 панорам, массу данных с бортовой измерительной аппаратуры и прошел, в общей сложности около 40 км. К сожалению, миссия «Лунохода-2» закончилась несколько раньше запланированного срока. 9 мая 1973 года «Луноход-2» обследовал крупный кратер на восточной границе разлома «Прямая». При выходе из него возникла аварийная ситуация приведшая к преждевременной гибели аппарата. 10 мая 1973 года «Луноход-2» замолчал навсегда. 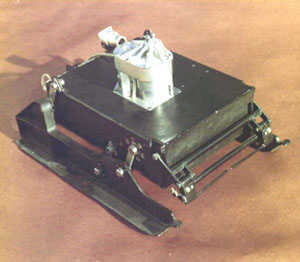 Модель посадочной платформы станции «Марс-2» с марсоходом «ПрОП-М». Ему надлежало отойти на 15 м от места посадки, но посадка оказалась слишком жесткой. Фото из архива NASA/JPL-Caltech Въезд на Марс В мае 1971 года, пока «Луноход-1» встречал рассвет своего седьмого лунного дня, в сторону Марса с Земли отправились два ракетоносителя «Протон-К» с автоматическими межпланетными станциями «Марс-2» и «Марс-3». Обе станции были снабжены спускаемыми модулями для посадки на поверхность. И ни одной из них не удалось выполнить свою миссию: «Марс-2» разбился при посадке, а «Марс-3» проработал всего 20 с. Но главное не это — обе станции несли на борту первые в мире марсоходы с загадочным названием «Прибор оценки проходимости — Марс», сокращенно — ПрОП-М. Это были весьма простые и предельно компактные разведчики. Вес устройства составил всего 4,5 кг, из научных приборов на борту были только динамический пенетрометр и гамма-лучевой плотномер для измерения плотности и структуры грунта. Передвигаться ПрОП-М должен был при помощи шагающего шасси, представляющего собой две «лыжи», расположенные по бокам корпуса. Питание и управление осуществлялось при помощи 15-метрового кабеля, соединяющего марсоход с посадочной ступенью, которая, в свою очередь, служила еще и станцией приема-передачи радиосигнала с Земли. В передней части ПрОП-М был расположен простейший датчик обнаружения препятствий. Каждые 1,5 м (или при столкновении с препятствием) марсоход должен был автоматически останавливаться и ожидать подтверждения курса. Такая система была необходима для сохранения контроля над аппаратом, ведь сигнал от Земли до Марса идет от 4 до 20 мин, в зависимости от их расстояния друг от друга. После неудачи с марсоходами последовала попытка усовершенствовать лунный разведчик. «Луноход-3» мог передавать стереоскопическое изображение с двух камер, которые располагались в поворотном гермоблоке, смонтированном на выносной штанге. Теперь для осмотра окрестностей «Луноходу» не нужно было разворачиваться всем корпусом, достаточно просто «покрутить головой». Такую компоновку позже позаимствовали марсоходы Spirit, Opportunity и Curiosity. Новый планетоход был полностью укомплектован всей бортовой и научной аппаратурой, прошел весь цикл наземных испытаний и… навсегда остался в музее НПО им. Лавочкина. Запуск, планируемый на 1977 год, так и не состоялся. Работы продолжались. Российский марсоход, созданный в Институте космических исследований, в 1992 году даже испытывался даже в Долине смерти (штат Калифорния), но на Марс попасть ему было не суждено. Планетоходы-разведчики снова появились в истории космонавтики только через двадцать с лишним лет. «Марсианский трактор» 4 декабря 1996 года с мыса Канаверал стартовала ракета-носитель «Дельта-2». Спустя ровно 7 месяцев, 4 июля 1997 года автоматическая межпланетная станция «Mars Pathfinder» совершила мягкую посадку на поверхность Марса. Помимо научного оборудования и систем связи на борту спускаемого модуля находился небольшой марсоход Sojourner. 5 июля он приступил к выполнению научных задач. Его шасси представляло собой шесть колес с индивидуальным приводом от электродвигателей постоянного тока. Марсоход был оснащен тремя видеокамерами (впереди стереопара и одна камера сзади) и подвижным спектрометром для изучения химического состава грунта и марсианских камней. Внутри него располагались три радиоизотопных элемента, использовавшихся для поддержания необходимой температуры в приборном отсеке. Управление осуществлялось при помощи микропроцессора. Сам марсоход обменивался сигналами только с посадочным аппаратом, который, в свою очередь, поддерживал связь с Землей. Всего Sojourner проработал чуть меньше трех месяцев. 27 сентября 1997 года состоялся последний штатный сеанс связи со станцией, после чего (до 7 октября) аппарат присылал только бессмысленную информацию не поддающуюся расшифровке. Попытки реанимировать аппарат предпринимались до марта 1998 года, но успехом они не увенчались. Всего за свою недолгую карьеру Mars Pathfinder успел передать 16,5 тыс. снимков, сделанных камерами посадочного аппарата, и 550 снимков с камер марсохода. Кроме того, совместными усилиями они пятнадцать раз провели анализ различных горных пород Марса.  Марсоходы не обнаруживают тяги к миниатюризации: самым маленьким из всех был Sojourner (в центре) — размером с микроволновку. До сих пор не потерявшие связи с Землей Spirit и Opportunity (слева) догнали и перегнали детскую педальную машину. Аппарат следующего поколения Curiosity, миссия которого начнется в будущем году, по размерам близок к небольшому паркетнику. Фото: NASA/JPL-Caltech Возможность и Дух После безвременной кончины Sojourner, уже в XXI веке были запущены еще два идентичных марсохода с весьма претенциозными названиями: «Дух» — Spirit (10 июня 2003) и «Возможность» — Opportunity (7 июля 2003). Их движитель состоит из шести колес, приводимых в движение электромоторами постоянного тока. Источником электроэнергии служат солнечные батареи, а «глазами» — две видеокамеры высокого разрешения, располагающиеся на выносной штанге с поворотным механизмом. Кроме того, Spirit и Opportunity основательно оснащены оборудованием для научных исследований. Тут есть и микроскоп, для изучения структуры грунтов и горных пород, и три спектрометра, и миниатюрный бур. Общение с Землей осуществляется при помощи ретранслятора, роль которого играет аппарат «Mars Odyssey», висящийся на орбите Марса с октября 2001 года. 4 и 25 января 2004 года аппараты совершили успешную посадку на поверхность «красной планеты». Но без неприятностей все-таки не обошлось. Во-первых, еще когда оба аппарата находились в полете, во время планового тестирования выяснилось, что на «Спирите» один из спектрометров работает некорректно. Далее, уже после посадки один из надувных амортизаторов посадочной ступени не сдулся после приземления и загородил марсоходу основной спуск с платформы. В результате «Спириту» пришлось несколько дней маневрировать, чтобы все-таки слезть со спускаемой ступени. 21 января засбоила flash-память марсохода, из-за чего бортовой компьютер принялся постоянно перезагружаться. К счастью, эту проблему также удалось успешно решить. Первоначально на Spirit была передана команда использовать энергозависимую память вместо flash-модулей, а затем накопители просто переформатировали, после чего работа аппарата вошла в штатный режим. Тем временем на Марс прибыл Opportunity. С ним тоже не всё прошло гладко. В ходе тестирования систем выяснилось, что из-за поломки термостата один из нагревателей периодически самопроизвольно включается в ночное время. Дополнительный расход электроэнергии несколько сокращает время работы марсохода от аккумуляторов, но эта неполадка не является критической. Spirit и Opportunity были рассчитаны на 90 дней эксплуатации. На сегодняшний день оба марсохода спустя шесть лет (!) все еще функционируют и поддерживают связь с Землей. За это время аппараты передали колоссальный объем научной информации, тысячи снимков Марса, нашли доказательство существования в прошлом жидкой воды на «красной планете», изучили следы вулканической активности. Opportunity даже обнаружил кусок скалы, с высокой долей вероятности являющейся древним метеоритом. Spirit же теперь официально получил статус «стационарной научной платформы». 23 апреля 2009 года марсоход увяз в области сульфатного песка. К этому времени у аппарата уже вышли из строя два колеса из шести, возможно поэтому попытки вызволить Spirit из песчаной ловушки, продолжавшиеся без малого девять месяцев, не увенчались успехом. Что касается Opportunity, то он все еще довольно бодро ползает по Марсу и, возможно, успеет сделать какие-нибудь сенсационные находки до своей кончины.  Марсианский ландшафт глазами Opportunity. Фото: NASA/JPL-Caltech/Cornell University В настоящее время уже построен еще один марсоход, также с говорящим именем «Любопытство» — Curiosity. Его запуск, в составе межпланетной станции Mars Science Laboratory, намечался на октябрь 2009 года. Однако NASA объявило о переносе миссии на 2011 год. Возможно, это связано с тем, что Opportunity и обездвиженный Spirit, несмотря на свой более чем почтенный возраст, пока сохраняют способность исследовать Красную планету. Юрий Попов
|
Случайные фотографии:






Статьи:
Видео:
Последние новости:
| Система ZX Тельца выбрасывает газовый пузырь |
| Аполлон-12: автопортрет |
| Небо в клеточку |
| Зона лучистого переноса |
| Исследование Меркурия |
Видео:
 | Зачем лететь на Марс? |
| Ударная Сила Боевые НЛО 3/4 |
| BBC. Космос (часть 2) |
Последние новости:
| Зонд НАСА рассмотрел ледяные горы на поверхности Плутона |
| На Землю надвигается сильный метеоритный дождь |
| NASA создаст роботов для ремонта и дозаправки спутников |
| Россия и Япония совместно построят космический телескоп |
|
WalkInSpace.Ru Правила: «Путешествие в космос» © 2025 Использование материалов допускается при условии указания авторства WalkInSpace.ru и активной ссылки на www.WalkInSpace.ru. |
|