Баллистика и навигация космических аппаратов
|
17.2. Математическая модель функционирования автоматизированной системы управления технологическим циклом БНО Одну из центральных функций з структуре АКУКП играет интегрированная автоматизированная система БНО (АС БНО), предназначенная для решения баллистико-навигационных задач (БНЗ) в интересах различных комплексов управления КА. АС БНО, общий вид которой, ориентированный на группировки беспилотных КА, изображен на рис. 17.1, является сложной территориал ьн о-распределенной информационно-управляющей системой с соответствующими видами обеспечения [17]. 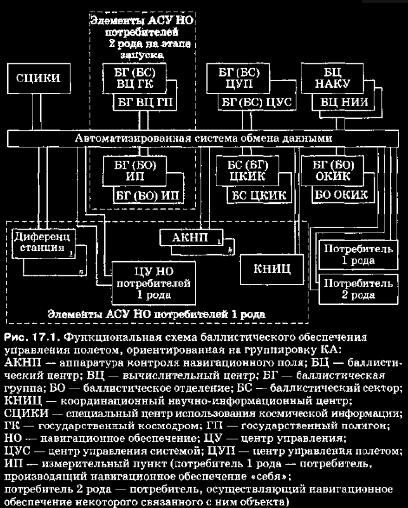 Она включает в себя информационно-вычислительные средства, средства связи и передачи данных, ПМО и средства поддержки в виде структур баллистического и технического обеспечения. Как и АКУКП в целом, АС ВНО имеет централизованную иерархическую структуру с ПМО, представляющим совокупность функционально и информационно связанных по уровням иерархии программных комплексов различного назначения, обеспечивающих объединение в систему средств автоматизации, управление их функционированием, решение всего состава БНЗ при испытаниях и эксплуатации КА. В состав решаемых АС БНО задач входят: ► отработка, тестирование и практическая реализация методов и алгоритмов решения БНЗ на ЭВМ; ► БНО юстировки и эталонирования измерительных средств автоматизированного управления; ► сбор, предварительная обработка и оценка качества сеансов измерений текущих навигационных параметров; ► решение задач БНО управления средствами НАКУ;► выдача исходных баллистических данных элементам НАКУ и внешним организациям для планирования работ и управления КА; ► обмен баллистическими и технологическими данными; ► астрономическое обеспечение НАКУ. Формализация функционирования системы предполагает необходимость введения [17] следующих понятий. Технологическая операция (ТО) — суть действий, выполняемых над массивом данных, принадлежащих одному КА (по существу, это операции по подготовке, решению БНЗ и контролю результатов решения). Технологический цикл (ТЦ) — целенаправленная упорядоченная совокупность ТО, каждая из которых связана определенным отношением, по крайней мере, еще с одной ТО. К ТЦ предъявляют жесткие требования по точности решения БНЗ и оперативности получения результатов как отдельных задач, так и выполнения ТЦ в целом. Обычно ТЦ подразделяют на оперативную и неоперативную части. Выполняемые работы по БНО управления некоторым множеством КА в течение заданного опорного промежутка времени (например, в течение суток) объединяют в оперативный (в частности, суточный) план. Процесс, состоящий из множества ТЦ, технологических и вспомогательных операций (ВО) и обеспечивающий выполнение оперативного плана, называют технологическим процессом БНО. Если известно множество ТО {TOj} и определено понятие отношения г между i-й и j-й операциями, то ТЦ может быть представлен в виде кортежа: 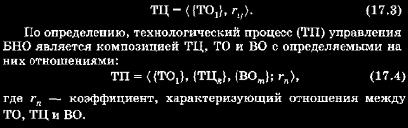 В основу построения СУ БНО должны быть заложены три основных принципа: автоматизации, интеллектуализации и гибкости. Реализация первых двух принципов связана с созданием СУ, сводящей к минимуму участие оператора в управлении ходом выполнения ТЦ в штатной ситуации. Так как управление ТЦ БНО невозможно осуществлять традиционными методами и приемами, при построении такой системы должны быть использованы положения теории ситуационного управления, применяемой для автоматизации интеллектуальных функций управления сложными системами организационно-диспетчере кого типа. В процессе выполнения оперативного плана могут возникать ситуации, в которых, с одной стороны, обнаруживается резкое противоречие между планом и реальным ходом ТЦ, с другой — у оператора отсутствуют четкие представления о том, что необходимо сделать для ликвидации последствий отклонения от плана. При этом возможны два случая отклонений такого рода.В первом оператору вообще неизвестны способы действий, поскольку подобная нештатная ситуация не встречалась ранее в его личном опыте и не предусмотрена инструкцией. Во втором, несмотря на необычность ситуации, в распоряжении оператора имеются отдельные приемы управления, комбинация которых дает возможность решить задачу (плановая нештатная ситуация). Вследствие указанных обстоятельств, СУ ТЦ должна не только интерпретировать текущую ситуацию и прогнозировать будущее, но и осуществлять диагностику причин возникновения ситуаций, формулировать план действий и контролировать его выполнение. Эти возможности СУ ТЦ могут быть реализованы только при использовании наряду с методом ситуационного управления методов искусственного интеллекта, предполагающих описание знаний о предметной области в базе знаний (БЗ) и при наличии логического механизма поддержки принятия решения. Данные обстоятельства приводят к необходимости ввода в состав СУ ТЦ наряду с управляющим элементом экспертной системы, предназначенной для накопления знаний о предметной области, анализа текущей ситуации на объекте управления и поддержки принятия решения по выполнению ТЦ с учетом складывающейся ситуации. технологическую гибкость определяют уровнем инвариантности показателей качества ТЦ к технологическим возмущениям, а оперативную гибкость оценивают по значению отклонений показателей качества при изменении номенклатуры КА в пределах допустимого множества. Кроме того, целесообразно ввести понятие интерактивной гибкости, которую определяют временем адаптации оператора к проведению ТЦ принятого на обслуживание КА. где Дв — подсистема, обеспечивающая взаимодействие с ОС, подсистемами приема и выдачи баллистических данных (СПБИ и СВБД), монитором (управляющей программой) технологического процесса (МТП) и интеллектуальным банком данных (ИБД); Дпк — подсистема подготовки и контроля для автоматической (автоматизированной) подготовки ИБД, необходимых для решения ЦБЗ, и контроля промежуточных финитных результатов; Дтц — подсистема формирования состава ЦБЗ и ИД для автоматического (автоматизированного) выполнения ТЦ; Дд<> — подсистема, обеспечивающая диалог с оператором; Д6з — подсистема формирования запуска и управления ЦБЗ; Дд — подсистема управления данными. $IMAGE3$ Рассмотренная концептуальная модель позволяет, с одной стороны, дать ее математическое описание, с другой — определить требования к СУ ТЦ, ее составляющим, а также к принципам их разработки. Систему S с X х У (где X — множество входных воздействий; У — множество ее реакций на входные воздействия) будем называть математической моделью, если задано семейство ТО (задач) Рх (л s X) с множеством решений (результатов) Y. Пусть в начальный момент т0 е Т система находится в начальном состоянии Cq, определяющем положение системы S в замкнутой ограниченной области С". Область С' называют пространством состояний системы, а Т — множеством дискрет функционирования. Изменение состояний системы S в процессе ее функционирования происходит как под влиянием внешних (поступление сеансов ИТНП из СПБИ, сигналов из СУ ТП на запуск ТЦ и т. д.), так и под влиянием внутренних (завершение выполнения ТО, запуск ТО, срабатывание таймера и т. д.) причин. В процессе функционирования системы и изменения ее состояния происходит обмен информацией с внешней средой (АСУ ТП) и оператором, поэтому математическая модель системы должна содержать в своем описании следующие механизмы: ► механизм изменения состояний под воздействием внутренних причин (без вмешательства внешней среды); ► механизм приема входного сигнала и изменения состояния системы под воздействием этого сигнала; ► механизм формирования выходного сигнала как результата реакции системы на внутренние и внешние причины изменения состояния Связи управления с проблемными ситуациями и возникающими при их появлении задачами поиска решений достигают путем учета логической последовательности этапов работы оператора при проведении ТЦ, выделении множества характерных проблемных ситуаций, же упорядоченного множества процедур принятия решений, реализуемых с помощью экспертной системы. Данная модель, отражающая общие принципы работы системы, все же не учитывает влияния погрешностей (деформаций) со стороны используемых технических средств, а также внешних условий среды (таких, как жесткие временные и точностные ограничения, меняющаяся целевая обстановка и др.) и поэтому требует дальнейшего уточнения. |
Случайные фотографии:





Статьи:
Видео:
Последние новости:
| Жизнь на Марсе может дорого стоить |
| Солнечный протуберанец |
| Космические зонды |
| Небо в клеточку |
| IC 418: Туманность — спирограф |
Видео:
 | Spitzer's Warm Mission |
| Гравитационные волны черных дыр |
| NASA's New Era of Innovation and Discovery |
Последние новости:
| Зонд НАСА рассмотрел ледяные горы на поверхности Плутона |
| На Землю надвигается сильный метеоритный дождь |
| NASA создаст роботов для ремонта и дозаправки спутников |
| Россия и Япония совместно построят космический телескоп |
|
WalkInSpace.Ru Правила: «Путешествие в космос» © 2024 Использование материалов допускается при условии указания авторства WalkInSpace.ru и активной ссылки на www.WalkInSpace.ru. |
|