15.5. Метод построения системы управления спуском
Рассмотрим один из возможных методов построения системы управления на гиперболических траекториях. Главная особенность описываемого метода построения СУС заключается в разделении основных задач управления на каждом характерном участке снижения СА с обязательным выполнением строго определенных требований.
Для реализации подобной СУС необходимо наличие на борту СА быстродействующей ЦВМ (бортовой ЦВМ), позволяющей оперативно проводить расчеты по определению текущего вектора состояния СА и прогнозированию его движения. Исходной информацией для решения системы уравнений движения СА с помощью БЦВМ являются данные о перегрузках, поступающие с трех взаимно перпендикулярных акселерометров, установленных на гиростабилизированной платформе. При этом оси чувствительности акселерометров совпадают с осями некоторой выбранной инерциальной системы координат.
Начальные данные для уравнений движения получают или автономно на борту СА, или засылают с Земли. С помощью наземных средств можно определить местоположение СА по высоте условного перицентра с точностью ±(1...3) км и скорость входа с точностью до ±(1...2) м/с. При последующем снижении СА в атмосфере в течение некоторого времени b.ty можно путем обработки на бортовой ЦВМ поступающей с акселерометров информации уточнить начальные данные Гвх и hR. При этом в течение времени Дty аппарат летит с постоянным значением качества, которое выбирают заранее с учетом ожидаемых начальных условий.
Поэтому на начальном участке СУС прежде всего должна решать задачу обеспечения «захвата» (с учетом перегрузочного режима) и только после гашения скорости до 9... 10 км/с можно переходить к выполнению конечной цели — обеспечению посадки СА в заданный район, выведению аппарата на орбиту ИСЗ и т. д.
С учетом переносимости человеческим организмом перегрузок можно определить некоторую максимально допустимую величину (птах)доп. На основе баллистического анализа движения СА определенной формы при обязательном выполнении условия «захвата» определяют минимально допустимую величину максимальной перегрузки (nmsx)mln, которая в общем случае зависит от скорости входа. Условиям задачи удовлетворяет любая траектория СА, при движении по которой с постоянным значением качества обеспечивается выполнение условия
Такая траектория при входе СА с гиперболической скоростью может быть только рикошетирующей. При этом на выходе аппарата из плотных слоев атмосферы скорость VBbIX будет существенно превышать круговую. Для гашения избытка скорости необходимо после прохождения максимума перегрузок «распрямить» траекторию с целью удержания СА в атмосфере.
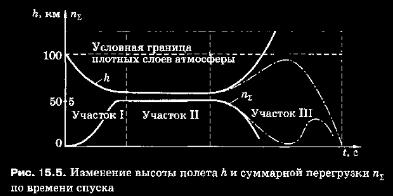
В результате выявляют три характерных участка траектории снижения (рис. 15.5): первый участок — от точки входа в плотные слои атмосферы до точки достижения максимума перегрузок; второй участок — от точки максимума перегрузок до границы надежного «захвата» СА атмосферой (эту границу легко определить при баллистическом анализе; она соответствует скоростям полета ^ 9...10 км/с); третий участок — от границы надежного «захвата» до области, в которой выполняются конечные условия.
На каждом из этих участков СУС должна решать наиболее важные, ответственные задачи. Так, на первом участке снижения СУС должна выполнить единственную задачу — вывести СА в область максимальных перегрузок (nmex)min < птех < (лтах)доп. На втором участке СУС решает задачу удержания СА в атмосфере и только на третьем участке обеспечивает выполнение требуемых конечных условий.
При использовании указанного метода создаются наиболее благоприятные условия для работы бортовой ЦВМ на наиболее трудных и наименее изученных участках движения СА. Например, движение аппарата на первом участке происходит в течение нескольких десятков секунд (меньше 100 с), поэтому основную задачу нужно решать в течение этого небольшого интервала времени. На втором участке расчет «вперед» производят только на время, равное 10...20 с. Третий участок снижения при «протяженных» траекториях и траекториях вывода на орбиту ИСЗ
по характеру решаемых задач и исходным предпосылкам подобен участку траектории после прохождения максимума перегрузок при возвращении со второй космической скоростью.
Несколько другой подход к решению задачи управления траекторией спуска применяют для «коротких» траекторий (с малой дальностью атмосферного участка) — «затягивание» второго участка, определенные условия выбора располагаемого качества.
|