13.4. Математические основы методов ближнего наведения без учета действия относительного гравитационного ускорения
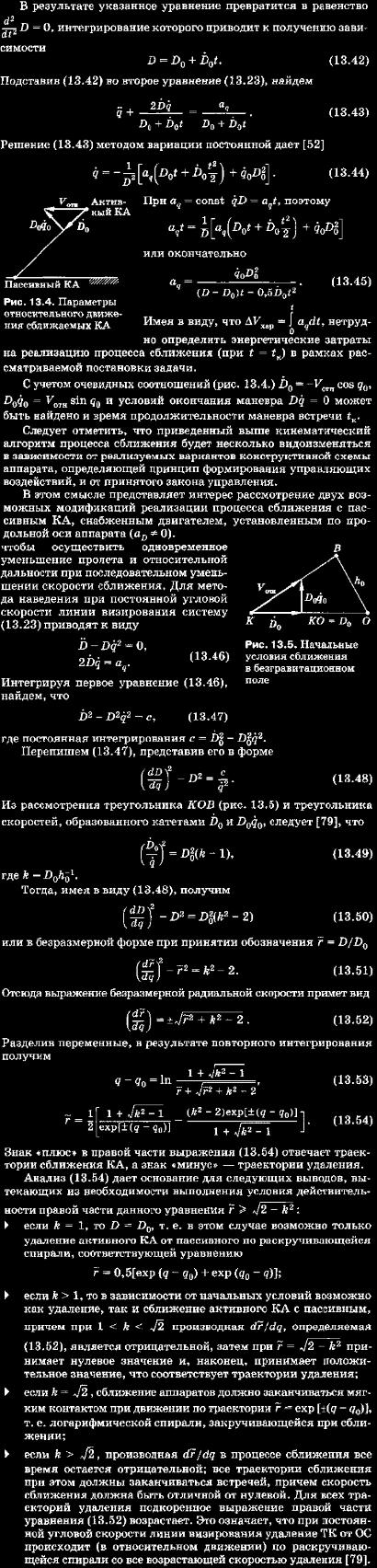
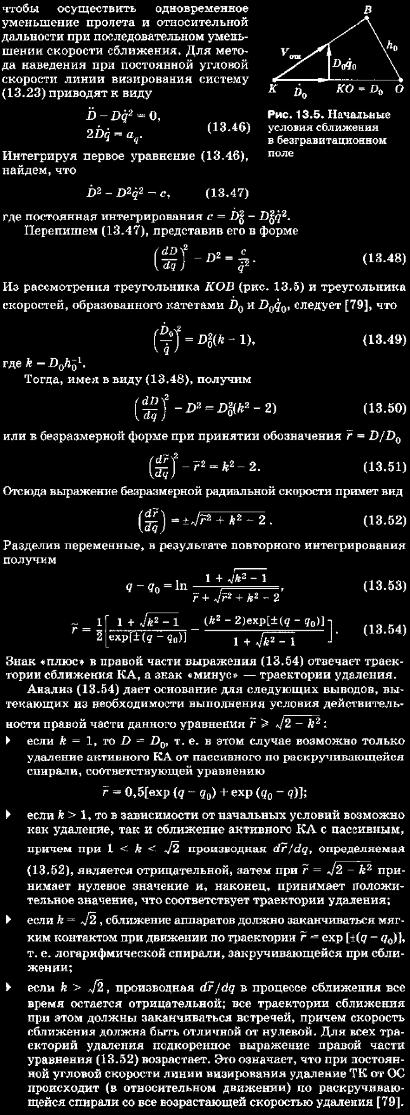
Предварительно дадим несколько определений, широко используемых при решении задач сближения в предположении об отсутствии относительного гравитационного ускорения (сближение в без гравитационном пространстве). Под относительной скоростью VOTH будем понимать вектор скорости активного КА по отношению к пассивному аппарату. Тогда плоскость, образованная векторами относительной скорости V0TH и относительной дальности D, будет представлять собой плоскость сближения, а минимальное расстояние h, которое будет иметь место при сближении КА в случае их движения в этой плоскости в соответствии с заранее введенной гипотезой об используемом законе, будем называть прогнозируемым пролетом или промахом.
Реализация метода параллельного сближения, относящегося к числу наиболее рациональных методов наведения в космическом пространстве, связана с некоторыми особенностями.
Суть их в том, что условие метода q' = 0 при наведении КА в космическом пространстве не выполняется. Угловая скорость линии визирования q' в процессе сближения оказывается отличной от нуля, хотя изменение ее и происходит в малом диапазоне. Поэтому для более точного отображения характера реального относительного движения объектов целесообразно принять q' = const в пределах ограниченного диапазона регулирования. Управление угловой скоростью линии визирования осуществляют при ориентации управляющего ускорения по нормали к ней, т. е. за счет aQ. Рассмотрение относительного движения КА с q' не равной const имеет смысл не только с точки зрения более реальной модели процесса, но и с точки зрения его анализа как самостоятельного метода. Это не означает, однако, что исследование классических предпосылок метода параллельного сближения применительно к условиям космического пространства лишено смысла. Учет динамики объекта во многих случаях излишне усложняет используемую модель, делает ее малоинформативной с позиций качественного анализа. Поэтому исследование кинематических алгоритмов процесса сближения при q' = 0 представляет определенный интерес и ему должно быть уделено соответствующее внимание. Положим в первом уравнении системы (13.23) q' = 0.
Применительно к первому случаю рассмотрим конструктивную схему активного КА, в которой не предусмотрено наличие боковых двигателей, формирующих управляющие ускорения по нормали к линии визирования. При этом, естественно, напрашивается мысль о необходимости переориентации КА (а следовательно, и его жестко установленной относительно корпуса двигательной установки) в процессе движения. В этом случае принципиально возможна реализация двух вариантов схем сближения:
► схемы с последовательным устранением пролета (мгновенного промаха) и скорости сближения;
► схемы с одновременным устранением пролета и скорости сближения.
Для первой из указанных схем (в идеальной постановке) сначала ориентируют тягу продольного двигателя по нормали к начальному положению линии визирования и устраняют пролет, затем осуществляют переориентацию двигательной установки и формируют управляющее ускорение вдоль линии визирования.
Для второй из указанных схем ориентацию вектора тяги двигательной установки при каждом ее включении выбирают такой,
|