Баллистика и навигация космических аппаратов
|
8.1. Структура, основные элементы и общая характеристика СНС Размещение радиотехнической аппаратуры на борту ИСЗ, т. е., по существу, замена наземных радионавигационных точек (РНТ) с известными координатами навигационными ИСЗ приводит к существенным изменениям традиционной структурной схемы построения радионавигационной системы. Помимо РНТ, выполненных в виде НИСЗ, и потребителей навигационной информации (ПНИ) она будет включать (рис. 8.1) также наземный командно-измерительный комплекс (НКИК). НКИК объединяет сеть разнесенных в пространстве измерительных пунктов (ИП) и координационно-вычислительный центр (КВЦ). Структура НКИК может быть как моноцентральной, так и региональной. В моноцентральных КИК данные измерений со всех ИП передают по широкополосным каналам линий связи (JIC) в единый КВЦ, осуществляющий централизованную обработку данных измерений параметров НИСЗ с целью получения информации о положении и скорости перемещения их относительно земной поверхности. В региональных КИК КВЦ располагается в непосредственной близости от ИП, что позволяет исключить использование широкополосных каналов связи и тем самым упростить структуру КИК. Однако существенным недостатком региональных КИК является малая зона наблюдения, ограниченная радиовидимостью измерительных средств. Поэтому с целью получения информации о НИСЗ на всей траектории его полета осуществляется объединение централизованных и региональных комплексов в единый КИК. Возможны и другие варианты построения КИК. Одним из наиболее перспективных направлений считается частичный или полный отказ от использования разветвленной сети ИП и передача их функций нескольким геостационарным ИСЗ. 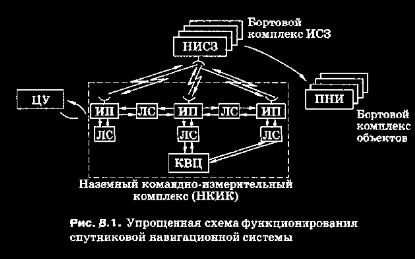 Центр управления (ЦУ), координирующий функционирование всех элементов СНС, оборудован запоминающими и программно-временными устройствами. Наиболее часто он располагается в непосредственной близости от центральной приемопередающей станции. В ряде случаев ЦУ может быть совмещен с КВЦ и размещен на большом расстоянии от приемопередающих станций ИП. Аппаратура ПНИ предназначается для выбора из видимой совокупности рабочего созвездия НИСЗ, приема от них сигналов, измерения навигационных параметров и обработки результатов измерений. Не затрагивая здесь вопросов функционального назначения отдельных подсистем СНС, кратко рассмотрим их основные характеристики и предъявляемые к ним требования. НАВИГАЦИОННЫЕ ИСЗ. В соответствии со структурой и принципами построения СНС навигационные ИСЗ выводят на орбиты ч высотами 600...36 000 км. Низковысотные НИСЗ соответствуют диапазону высот орбит 600...3000 км с периодом обращения 1,6. ..2,5 ч. Средневысотные НИСЗ располагают в диапазоне выпот 13 000...20 000 км и имеют период обращения 8...12 ч. Наибольшие высоты орбит (36 100 км) отвечают так называемым геостационарным {геосинхронным) спутникам, период обращения которых равен полному повороту Земли относительно своей оси Яращения, т. е. 24 ч. Такие спутники в силу равенства угловых скоростей вращения их по орбите с угловой скоростью вращения Земли как бы зависают над какой-либо определенной точкой поверхности (откуда и произошло их название). Такого типа НИСЗ представляются достаточно интересными как с теоретической, так и с практической точек зрения как эффективное средство решения навигационных задач, поскольку обладают значительной зоной видимости (угловой диаметр 162°). Наиболее целесообразный тип орбит — квазикруговые. Спутники должны иметь систему угловой стабилизации. При создании доплеровской навигационной системы «Транзит» предпочтение было отдано применению гравитационной системы ориентации (ГСО) с магнитной системой успокоения как наиболее простой и надежной. Такого рода система впервые была испытана в 1963 г. на спутнике «Транзит-5А». НИСЗ «Навстар» уже используют систему стабилизации, обеспечивающую 3-осную ориентацию спутника относительно поверхности Земли (что требует принципиально иного ее построения, чем ГСО) при обеспечении значительно более высоких точностных характеристик. В качестве источников энергии для бортовой аппаратуры НИСЗ применяют солнечные батареи, на затемненной части орбиты подключают аккумуляторы. Спутники НС «Навстар» первой модели были оснащены панелями солнечных батарей общей площадью 5 м2. К концу расчетного периода они должны были обеспечивать мощность порядка 490 Вт. Спутники второй модели уже имели панели увеличенной площади (около 7,2 м2 с расчетной мощностью 700 Вт). Дополнительно на спутниках второй модели установлены кольцевые антенны дециметрового диапазона для передачи по линии «спутник—спутник» информации от детекторов радиационной разведки IONOS. Это потребуется, если в момент обнаружения детекторами ядерного взрыва спутник «Навстар» будет находиться вне зоны радиовидимости станций, предназначенных для приема информации от детекторов IONOS. Связь по линии «спутник—спутник» позволит передать эту информацию со спутника «Навстар» на Землю через спутник-ретранслятор. Детекторами IONOS были оснащены 8-й и 11-й спутники «Навстар» первой модели, но антенн для связи по линии «спутник—спутник» они не имели. По сравнению с другими спутниками аналогичного назначения спутники «Навстар» имеют более простую конструкцию (40 ООО деталей по сравнению с 80 ООО...100 ООО деталей в сопоставимых конструкциях), что обеспечивало его более высокую надежность. При создании системы координирование обращающихся НИСЗ (т. е. сетевой системы) развертывание спутников осуществляют последовательно. Обычно сначала создают региональную сеть, затем по мере увеличения количества спутников 200 в системе обеспечивают глобальное непрерывное покрытие. Применительно к системе «Навстар» была принята трехступенчатая схема развития: размещение по три НИСЗ на двух орбитах (1-я фаза), выведение еще трех спутников на третью орбиту (2-я фаза) и, наконец, доведение числа спутников на каждой орбите до полного состава (3-я фаза). С точки зрения общей теории количество спутников в сети НИСЗ нужно выбирать из соображений обеспечения заданной кратности глобального покрытия земной поверхности зонами видимости, заданной точности месгоопределения и минимальной взаимной интерференции принимаемых сигналов. Как показали исследования, при использовании НИСЗ на круговых полярных орбитах с высотой 20 ООО км непрерывная видимость хотя бы одного спутника для объекта, расположенного на экваторе, достигается в зависимости от угла места при наличии в системе 7... 14 спутников. Однако следует иметь в виду, что в связи с необходимостью гарантированного перекрытия зон видимости (около 5°) для обеспечения решения задачи навигации при глобальном непрерывном покрытии земной поверхности требуется увеличение числа спутников в 1,5...2 раза. Помимо выведения на орбиты основных спутников обычно планируют выведение и нескольких резервных спутников (как правило, не более трех). Указанные спутники должны, обращаясь в трех не соседствующих друг с другом плоскостях, свести до минимума влияние, которое может оказать на функционирование системы выход одного или более основных спутников. В этом случае по командам с Земли резервные спутники займут соответствующее положение в составе СНС. Одной из наивыгоднейших считается система из 24 НИСЗ (в системе GPS 18 спутников МО США и 6 спутников федерального авиационного управления), размещенных равномерно в трех плоскостях, наклоненных под углом 63° к экваториальной плоскости и разнесенных по долготе на 120°. При этом рекомендуемая высота круговых орбит должна составлять примерно 20 ООО км. Каждый из НИСЗ такой сети дважды в сутки пересекает в северном направлении экватор так, что узлы оказываются сдвинутыми на 180°. Подспутниковая точка в этом случае будет перемещаться по замкнутой кривой, две волны которой включают все долготы. Спутники в каждой плоскости будут следовать с интервалом 1,5 ч, а следы (трассы) их орбит пересекают экватор со сдвигом по долготе на 22°30'. Желательно, чтобы все НИСЗ сети излучали сигналы одинаковой структуры, используемые для измерений дальности и радиальной скорости. Индивидуальным для каждого спутника является содержание передаваемой им служебной информации. НАЗЕМНЫЙ КОМАНДНО-ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС (НКИК). Решение задач, возлагаемых на НКИК, невозможно без Проведения большого количества расчетов, связанных с обработкой громадных объемов информации, получаемой от средств BHELUHETPAE«ТОРНЫХ ИЗМЕРЕНИЙ (ВТИ) И РАДИОТЕЛЕМЕТРИИЕСКИХ СИСТЕМ (PTJIC). Указанные расчеты проводят в вычислительном центре (ВЦ). В том случае, когда ВЦ наряду со своей основной задачей выполняет функции координации всех составных элементов НКИК, его называют координационно-вычислительным центром (КВЦ). Функции НКИК в системе «Навстар» выполняет наземный комплекс базы ВВС США «Фортуна» (штат Северная Дакота), являющийся главным пунктом управления спутниковой сетью. Измерительные пункты (ИП). реализующие ВТИ путем пас. сивных измерений орбитальных параметров всех НИСЗ, стараются разнести по широте и долготе. В частности, ИП системы «Навстар» размещены на Аляске, в Калифорнии, на Гавайских о-вах и на о-ве Гуам. Станции слежения ИП должны включать приемоизмерители, подобные аппаратуре потребителя, атомный стандарт частоты, датчики атмосферных параметров в микропроцессорную ЭВМ. В качестве линий связи (ЛC) могут быть использованы кабельные каналы, радиорелейные линии, а также радиолинии. По этим же линиям может поступать для передачи на борт служебная информация, подготовленная в КВЦ. Контроль достоверности закладываемой на борт служебной информации осуществляют по каналу обратной связи, для чего используют телеметрические данные (слова) из кадра сигнала НИСЗ. ЦЕНТР УПРАВЛЕНИЯ. Особенностью функционирования НКИК является то, что в силу орбитального движения НИСЗ и суточного вращения Земли радиосвязь со спутником в используемом ультракоротковолновом диапазоне возможна только в течение сеансов определенной продолжительности. Поэтому наиболее используемым ЦУ является ПРОГРАММНО-ВРЕМЕННОЙ МЕТОД УПРАВЛЕНИЯ. Его суть в том, что передачу (закладку) служебной информации, а также выполнение программ работы бортовых приборов и систем осуществляют с помощью программно-временных устройств, функционирование которых синхронизировано по времени с помощью СЛУЖБЫ (СИСТЕМЫ) ЕДИНОГО ВРЕМЕНИ (СЕВ). СЕВ реализуется с помощью бортовых и набора местных часовых устройств (хранителей времени), которые входят в состав ИП и ЦУ. Все часы, включенные в СЕВ, сверяют с высокостабильными эталонами времени. ВОРТОВОЙ КОМПЛЕКС ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ (6К ПНИ). Для решения задачи выбора на совокупности видимых НИСЗ сетевой системы рабочего созвездия БК ПНИ должен иметь антенну с независимо управляемыми четырьмя лучами, например фазированную антенную решетку. Для полностью развернутой системы из 24 НИСЗ над радиогоризонтом ПНИ в зависимости от условий (места и высоты полета) могут находиться 5... 11 спутников. К числу наивыгоднейших созвездий обычно относят четверку, в которой один НИСЗ находится в зените ПНИ, а три остальных — как можно ближе к горизонту, с максимальным удалением. В каналах поиска и измерения обычно используют кольца фазовой и частотной автоподстройки. В процессе обработки информации метки времени, передаваемые каждым из НИСЗ, необходимо уточнять с помощью временных поправок, учитывающих смещение данной спутниковой шкалы относительно шкалы СЕВ. Эфемериды, относящиеся к ближайшей временной точке, экстраполируют на уточненные моменты проведения измерений. Статистическая обработка результатов измерений способствует повышению точности решения навигационной задачи. Все расчеты, проводимые на борту ПНИ, выполняют с использованием ЭВМ. При этом в зависимости от степени автоматизации процесса вычислительные системы (ВС) принято подразделять на специализированные, программно-ориентированные и проблемно-ориентированные. Специализированные ВС применяют в случае решения узконаправленной специальной задачи, алгоритм которой реализуется структурой вычислителя в виде единого вычислительного процесса. Два других типа ВС имеют более или менее универсальную структуру. Различие заключается в степени универсализации и диапазоне решаемых ими задач. Программно-ориентированные ВС реализуют заранее составленные и жестко записанные в их запоминающем устройстве (памяти) программы. Решение каких-либо других задач путем ввода программ или вмешательство в их работу с использованием пульта невозможно. Проблемно-ориентированные ВС в последнее время находят все более широкое применение в автоматизированных навигационных комплексах. Они позволяют не только решать задачи навигационного обеспечения движения (т. е. полностью выполняют функции программно-ориентированных ЭВМ), но и задачи диагностического характера, а также другие, возникающие при псштатпых ситуациях. Обращение к вычислительной системе при этом может производиться как с помощью автоматического ввода данных, так и с использованием пульта. С точки зрения конструктивного выполнения вычислительных систем ПНИ могут быть использованы два структурных способа их построения: на базе многофункциональной ЦВМ и при применении микропроцессоров и микроЭВМ. Бортовая многофункциональная ЦВМ по принципу действия мало отличается от стандартных универсальных ЭЦВМ. Различия усматриваются только в конструкции и условиях эксплуатации. Под микроЭВМ понимают ЦВМ, состоящую из микропроцессора, к которому добавляют запоминающее устройство, внешние устройства, устройства управления вводом и выводом информации и т. д. В навигационных системах применяют микропроцессоры как с жесткой логикой, так и с использованием принципа микропрограммирования. Большая часть из них является восьми- или шестнадцатиразрядными. В качестве единицы обрабатываемой информации выступает БАЙТ, равный восьми Бит (восьми двоичным разрядам). Учитывая весьма широкий спектр допустимых вариантов построения СНС, целесообразно привести одну из их возможных классификаций, заимствованную из работы. В качестве основных классификационных признаков, положенных в основу разделения принципиально возможных схем построения СНС, выступают главным образом те из них, которые оказывают решающее влияние на технико-эксплуатационные характеристики СНС. К ним прежде всего следует отнести место решения навигационной задачи. По данному признаку все СНС делят на системы самоопределения и системы иноопределения. Для первой из них характерно непосредственное определение параметров движения объектов (по крайней мере координат) на борту самого ПНИ. В системах второго типа павигациопную задачу решают вне борта ПНИ. Для объектов военной техники вариант построения СНС по схеме систем самоопределения является основным. Вариант иноопределения используют главным образом тогда, когда координаты ПНИ необходимы какой-либо наземной службе. По признаку наличия у ПНИ навигационного передатчика СНС подразделяют на активные и пассивные системы. Активные системы располагают бортовым навигационным передатчиком. В вариантах самоопределения этот передатчик излучает запросные сигналы, а при иноопределении — либо запросные, либо ответные. В активном режиме самоопределения НИСЗ выступает как ретранслятор навигационных сигналов, посылаемых с различных ПНИ, что ограничивает пропускную способность системы. Другим, весьма существенным недостатком такого типа систем является демаскирующий характер их работы. В пассивных системах навигационные сигналы в своем темпе излучает передатчик НИСЗ, а на борту ПНИ эти сигналы принимаются и обрабатываются. С объектов, лишенных сложного бортового оборудования, эти сигналы ретранслируются для последующей обработки в НКИК. По темпу выдачи навигационных решений СНС делят на системы дискретного действия и системы непрерывного действия. Последние ранее уже были названы нами сетевыми. В отличие от дискретных сетевые СНС могут выступать как самостоятельные средства высокоточной навигации. Классификация по организации измсрспий предполагает разделение СНС по темпу выдачи навигационных решений применительно к вариантам построения аппаратуры ПНИ. По этому признаку бортовую аппаратуру ПНИ (БАПНИ) подразделяют на одно-канальную и многоканальную. При одноканальном построении БАПНИ измерительный канал настраивают на слежение за сигналом одного НИСЗ, поэтому измерения по нескольким НИСЗ можно выполнять только последовательно во времени. Такое построение свойственно аппаратуре низкоорбитальных СНС дискретного действия. Многоканальное построение приемоиз-мерителей обеспечивает параллельный и одновременный прием сигналов от задействуемой группы НИСЗ, что требуется при применении СНС непрерывного действия (сетевых СНС). По па-раметричнасти измерительного канала различают СНС с координатными и со скоростными измерениями. К координатным относят дальномерные, угломерные и разностно-дально-мерные системы. К скоростным принадлежат радиально-скоро-стные, разностно-радиально-скоростные, а также углоскоростные. По характеру эфемеридного обеспечения СНС подразделяют на системы с эфемеридным обеспечением по прогнозу и системы с уточнением эфемерид в навигационном сеансе. В первом случае эфемериды рассчитывают и прогнозируют в КВЦ по результатам ВТИ и ретранслируют через НИСЗ ПНИ, принимающим их в составе навигационного сигнала. Если периодичность их обновления 1...2 раза в сутки, ПНИ приходится пользоваться устаревшей эфемеридной информацией, что снижает суммарную точность решения навигационной задачи. В системах второго вида во время навигационного сеанса на борту НИСЗ выполняют траекторные измерения по наземным ИП, результаты которых используют для уточнения орбитальных параметров. При этом решение краевой задачи, к которой сводится рассматриваемая задача, может проводиться или на борту НИСЗ (если там предусмотрено наличие достаточно мощной ЭВМ), или на борту ПНИ, который получает от НИСЗ измерительную информацию вместе с навигационным сигналом. Точность решения навигационной задачи при таком подходе возрастает, но достигают этого за счет усложнения и увеличения оборудования на борту НИСЗ со всеми вытекающими отсюда последствиями. Системы иноопределения на борту НИСЗ можно также развить на случай уточнения эфемерид в навигационном сеансе, если допускается, чтобы такие системы были менее точными, нежели системы самоопределения. |
Случайные фотографии:





Статьи:
Видео:
Последние новости:
| Небо в клеточку |
| Северный магнитный полюс Земли |
| Корональные выбросы массы |
| Нейтронная звезда в IC443 |
| Открытие Зодиака |
Видео:
 | Webb Telescope Trailer |
| Ударная Сила Боевые НЛО 2/4 |
| "Джейсон-2" следит за изменениями в океане |
Последние новости:
| Зонд НАСА рассмотрел ледяные горы на поверхности Плутона |
| На Землю надвигается сильный метеоритный дождь |
| NASA создаст роботов для ремонта и дозаправки спутников |
| Россия и Япония совместно построят космический телескоп |
|
WalkInSpace.Ru Правила: «Путешествие в космос» © 2024 Использование материалов допускается при условии указания авторства WalkInSpace.ru и активной ссылки на www.WalkInSpace.ru. |
|