4.5. Оптимизация схем полета
Для различных схем полета вид и структуру критерия оптимизации определяют количеством активных операций, на проведение которых необходимы запасы топлива на борту КА.
Величина критерия зависит от вида траектории, т. е. от дат пролета планет, дат старта КА с Земли. Поскольку для методики сфер действия нет конечного аналитического решения, описывающего зависимость критерия от временных параметров траектории, то на практике создаются специальные программные комплексы, с помощью которых рассчитывают критерий для заданной схемы полета, проводят оптимизацию траекторий, т. е. выбирают комбинации временных параметров, обеспечивающих минимум критерия для заданной схемы полета.
Рассмотрим схемы полета к одной планете без возвращения к Земле. С их использованием осуществлены полеты советских и американских КА к Марсу и Венере. Они позволяют доставлять на планету исследовательские лаборатории, создавать ИСП, с помощью которых проводят глобальное исследование планеты. Наиболее простой из данного типа схем является схема перелета с Земли к планете с посадкой на ее поверхность.
Одной из главнейших характеристик схемы является величина энергетических затрат, требуемых на реализацию перелета. Под этим понимают величину скорости, которую необходимо сообщить КА при формировании траектории перелета, обеспечивающей решение поставленной целевой задачи. Для простейшей схемы эти затраты связаны с сообщением КА импульса разгона, требуемого для отлета с опорной орбиты ИСЗ. Как показано в § 4.4, в случае оптимальной схемы старта с орбиты ИСЗ величину импульса разгона AVCT определяют как разность скоростей VпT в перицентре гиперболы отлета от Земли и VKp на круговой орбите ИСЗ. Величина AVCT зависит от даты старта и времени перелета КА к планете назначения.
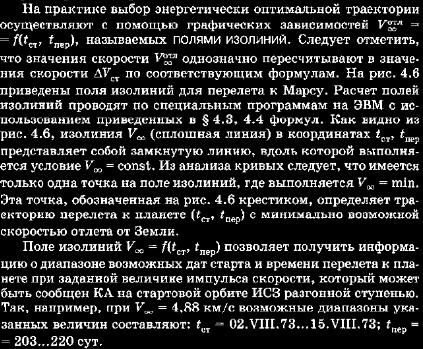
На практике номинальные траектории перелета КА к планете выбирают в некоторой окрестности энергетическ! оптимальной траектории. Это позволяет, с одной стороны, максимизировать начальную массу КА на траектории перелета, с другой стороны, — получить необходимое время на проведение предстартовой подготовки КА (в случае отказов бортовых систем — на их устранение).
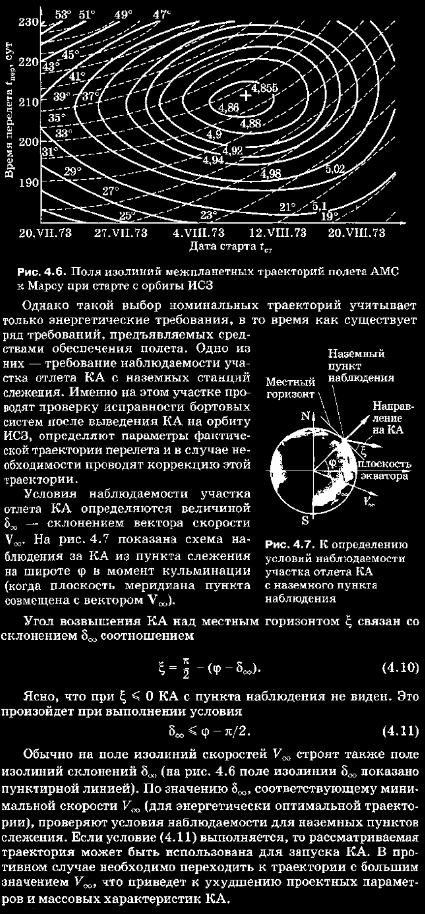
Можно также построить изолинии для других критериев (таких, как скорость входа КА в атмосферу планеты для посадочного аппарата, широта возможных мест посадки, границы освещенности поверхности планеты и т. д.), величина которых существенно влияет на проектно-массовые характеристики КА. Представление результатов расчета с помощью полей изолиний позволяет выбрать номинальные траектории перелета с учетом всех ограничений. Необходимо отметить, что этот способ представления результатов возможен лишь для сравнительно простых схем полета, у которых число определяющих траекторию перелета переменных невелико. Для более сложных схем полета, например, таких, как облет планет с использованием гравитационного маневра, графическая интерпретация результатов расчета получается весьма сложной, что не позволяет определить все необходимые параметры, однозначно характеризующие траекторию полета КА. Для оптимизации таких схем полета разрабатывают специальные методы, позволяющие получить номинальные траектории с учетом всех заданных ограничений.
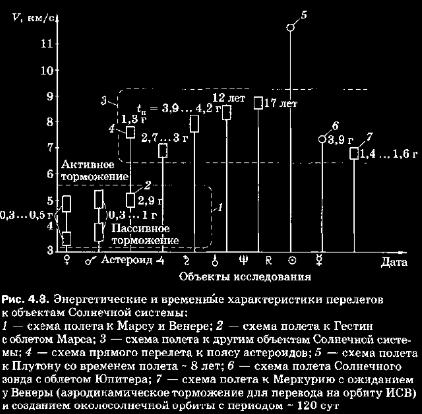
Имея в виду сформулированные в табл. 4.1 требования к схеме полета на различные планеты Солнечной системы, можно уточнить энергетические и временные характеристики экспедиций. Результаты соответствующих исследований отражает диаграмма на рис. 4.8, понимание которой требует некоторых пояснений.
Как следует из табл. 4.1, экспедиции к Венере и Марсу связаны с необходимостью предварительного выведения аппарата на орбиту ИСП. При этом в принципе возможно использование двух подходов:
► на основе активного торможения аппарата с помощью ТДУ;
► на основе управляемого торможения аппарата в атмосфере планеты при использовании его аэродинамического качества (пассивного торможения).
Первый подход был реализован в процессе экспедиций всех отечественных АМС в период 1975—1990 гг. Второй получил признание относительно недавно.
Современный уровень развития космической науки и техники позволяет реализовать второй способ при существенном снижении затрат характеристической скорости на выполнение экспедиции. Приведенные результаты показывают, что описанные схемы полета к Марсу и Венере предоставляют возможность выведения полезной нагрузки на круговые орбиты ИСП при запасах характеристической скорости Vxap = 3,2...5,2 км/с и времени перелета к планетам tп = 0,3...1 г.
Полеты к другим объектам Солнечной системы (Меркурию, Солнцу, астероидам, планетам-гигантам) уже требуют запасов характеристической скорости порядка 6,5...8,9 км/с и tn = 3...17 лет. Для исследований околосолнечного пространства и астероидов соответствующие оценки приведены для схем с использованием активно-гравитационного маневра при облете Марса (изучение астероидов) и Юпитера (исследование околосолнечного пространства).
Подчеркнем, что приведенные результаты получены для применения в качестве базовых ракет-носителей (РН) «Протон» и разгонных блоков (РБ) «ДМ», обеспечивающих доставку на орбиту ИСП Марса или Венеры полезную нагрузку порядка 2300...2500 кг при массе доставляемого на поверхность Марса посадочного аппарата около 1800 кг. Масса малого межпланетного модуля, способного совершать перелеты в дальнем космосе (при запасе характеристической скорости = 1,5...3,7 км/с), оценивалась величиной = 1300 кг.
|